BrainVoyager v23.0
Probabilistic Maps from Surface Maps
Probabilistic maps can be calculated from a set of subject-specific functional surface maps, which must be available as sub-maps in a single SMP file.
Preparing a SMP File as Input
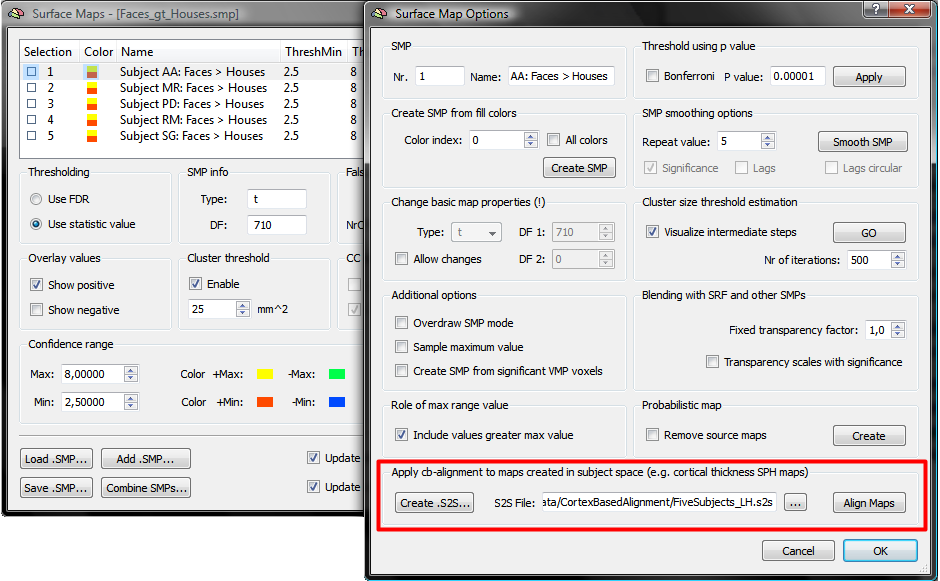
When using non-GLM data (e.g. cortical thickness maps), SMP files are typically created separately for each subject. In order to be ready for integration, the source SMP map of each subject must be defined on a (folded) SPH mesh, which participated in a cortex-based alignment procedure. The maps from the different subjects can then be combined in a single SMP file by using the Load SMP and Add SMP buttons of the Surface Maps dialog. Sub-maps may also be removed by pressing the Delete key after highlighting the respective entry in the Maps list. While a probability map could be created after integrating the SMPs defined in subject space, the individual maps would not be optimally co-registered because the cortex-based alignment (CBA) step has not been performed yet, which transforms the maps from subject space into the group-aligned cortex space. In order to apply the CBA step prior to calculation of a probabilistic map, the maps of participating subjects must be transformed using the subject's alignment (SSM) files, which are available as the result of cortex-based alignment. The alignment can be performed using the Apply cb-alignment to maps created in subject space field in the Surface Map Options dialog; for more details, check the topic CBA Transformation of SMPs.
The described CBA application step is not necessary when calculating a probabilistic surface map using SMPs derived from a multi-subject GLM because the beta maps of a group-GLM are already aligned during multi-subject GLM calculation. As in the case of volume maps, all subject-specific maps can be created in a single step using the Create separate maps for each subject option in the Overlay GLM Options dialog; more information how to use this feature is described in the Creating Multi-Subject T and Beta Maps from Mult-Subject GLMs topic. Note that for the creation of probabilistic maps, only positive t values are used; to get, for example, a probabilistic map for face selective areas, the contrast "Faces > Houses" might be used in a experiment showing blocks of "houses" and "faces"; to get a probabilistic map for "house-selective" areas, the opposite contrast ("Houses > Faces") might be used. Besides selecting an appropriate contrast (in the context of a certain experimental study), the outcome of the probabilistic map will depend also on the thresholds used for each map: A subject will be counted as "activating" at a spatial location (vertex), if the map value at this location passes the maps threshold. While thresholds should be the same across subjects, it might sometimes be justified to use different thresholds per subject.
Calculating the Probabilistic Map
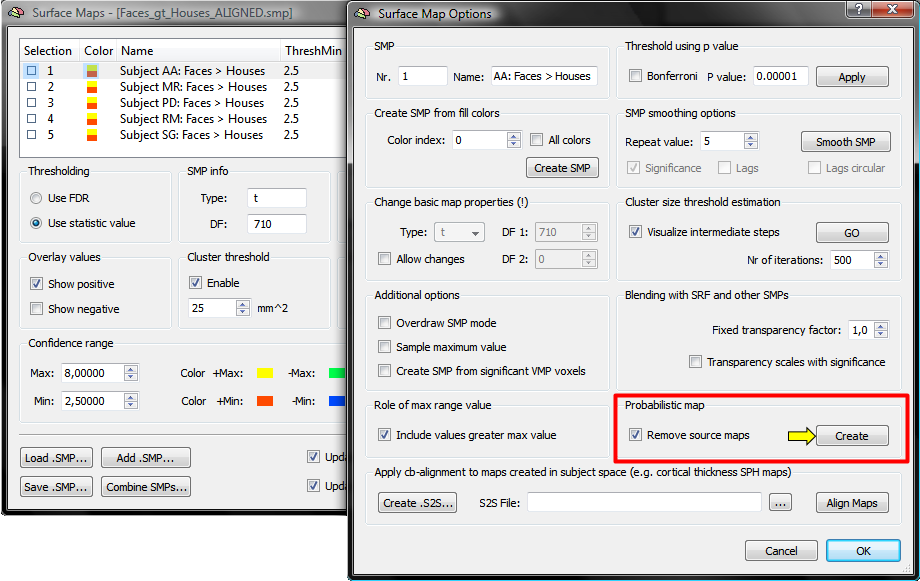
When a suitable input SMP file has been prepared, a probabilistic map can be calculated by clicking the Create button in the Probabilistic map field of the Surface Map Options dialog (see snapshot above). A created probabilistic map is normally appended to the list of existing maps. If you want to remove the input sub-maps, you can remove individual maps by pressing the Delete key after highlighting a map in the list. As a quicker alternative, you may want to check the Remove source maps option (see snapshot above) before clicking the Create button in the Probabilistic map field. The surface maps list in the Surface Maps dialog will then contain only the created probabilistic map.
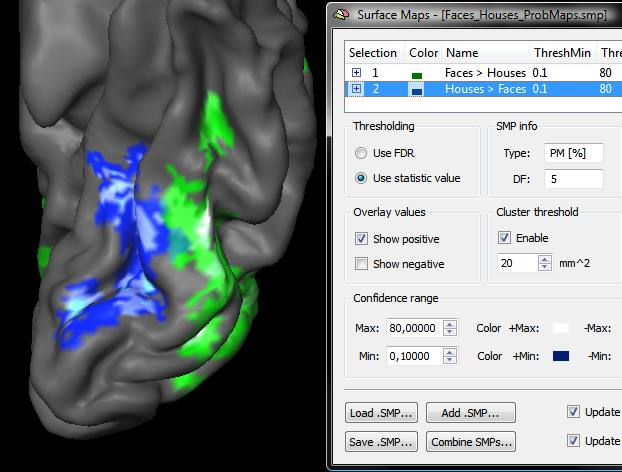
A created probabilistic map is not automatically saved to disk; Use the Save SMP button to store the map allowing to integrate it with other probabilistic maps calculated for the same group of subjects. You may also want to give the map a more specific name, which can be done in the Surface Map Options dialog after highlighting a sub-map in the Surface Maps dialog. The snapshot above shows two probabilistic maps, which have been created from the same GLM data and integrated into a common SMP data structure (probabilistic map “Faces > Houses” in green and probabilistic map "Houses > Faces" in blue). Furthermore, each probabilistic map was assigned an individual overlay look-up table (OLT) using the Browse LUT button in the Confidence range field of the Surface Maps dialog.
Copyright © 2023 Rainer Goebel. All rights reserved.